

































Guru Nanak Institutions is one of the largest educational groups in India with 10,000+ Students currently enrolled in various programs of studies including Engineering and Technology, Pharmacy, Business Management and Dental Science.
Founded by visionary industrialist and well known philanthropist Sri Tavinder Singh Kohli, Founder and Chairman of GNI.
The beginning happened with the foundation of Guru Nanak Educational Society in the year 1998.
Companies for campus placements in Guru Nanak Institutions
Placements Offered in Guru Nanak Institutions
Engineering Highest Package Offered
Management for Guru Nanak Institutions campus placements












































































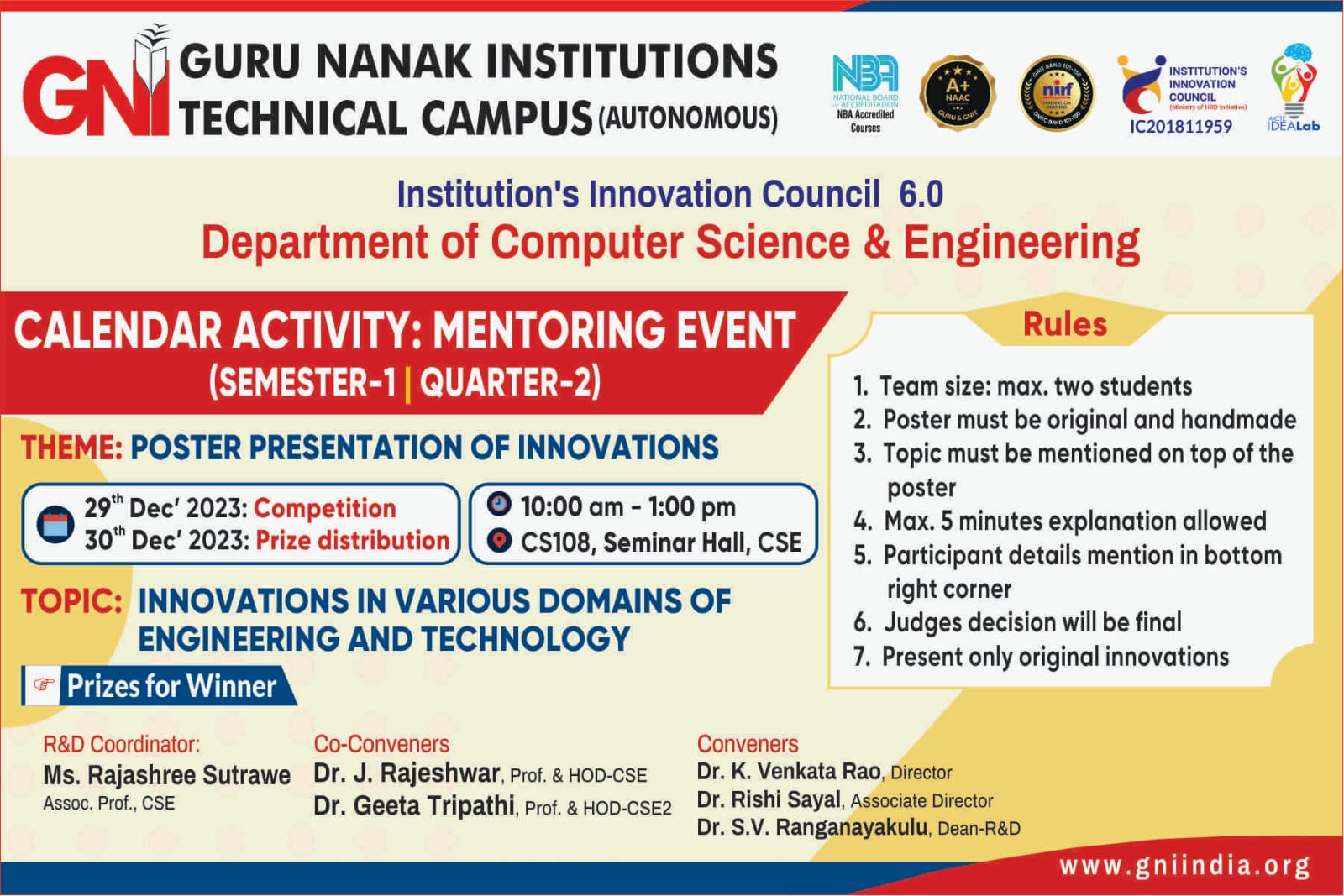
Notice Board
 A Three-Days Seminar
on
Quantum Artificial Intelligence (QAI) for
Next-Generation
Electric Vehicle Technologies
A Three-Days Seminar
on
Quantum Artificial Intelligence (QAI) for
Next-Generation
Electric Vehicle Technologies

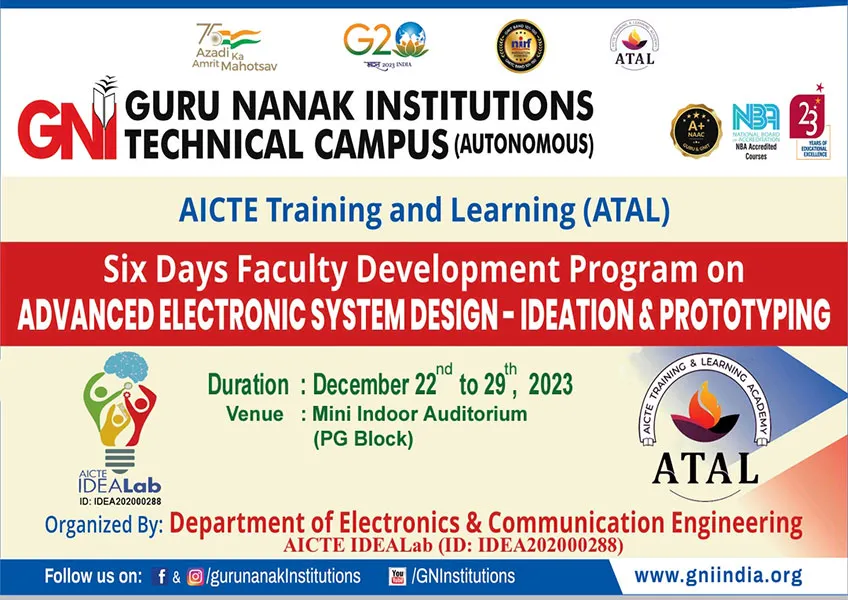
A 5 Day Online Faculty Development Program
Atal FDP ONLINE PROGRAM 2024
Department of AI&ML and AI&DS one week online Faculty Development Program on “UI-DESIGN FLUTTER”

ETL-KAFKA/TALEND
Date: July 1st - July 6th 2024
Time: 2PM to 4PM.

TECH-IGNITION
Date: 13th June, 2024. | 10.00 AM
Venue: Indoor Auditorium, GNITC.
World Environment Day
Date: 5th June, 2024. | 10.00 AM - 04.00 PM
Venue: Mini Auditorium, GNITC.
Yuvnix 2024
Date: 25th May, 2024. | 09.30 AM
Virtual Vista 1.0
Date: 25th May, 2024. | 10.30 AM
Two-Days training program on CCNAv7 networking essential
Date: 10th & 11th May, 2024. | 09.10 AM - 04.30 PM
Important Dates:
Submission Deadline: 20th May 2024, Monday
First Round Result Announcement: 23rd May 2024, Thursday
Final Round: 25th May 2024, Saturday
Final Round Result: 1st June 2024, Saturday
Registration Fee:
IEEE Member: Rs.50 per individual
Non-IEEE Member: Rs.150 per individual
Winners will receive prizes, and all participants will receive e-certificates.

Two-Days training program on CCNAv7 networking essential
Date: 10th & 11th May, 2024. | 09.10 AM - 04.30 PM
Poster presentation of business plans & linkage with innovation ambassador
Date: 6th & 7th May, 2024. | 10.00 AM onwards
National technologies day
Date: 11th May, 2024. | 10.00 AM
Annual Day Celebrations 2K24
Date: 4th May, 2024. | 10.00 AM
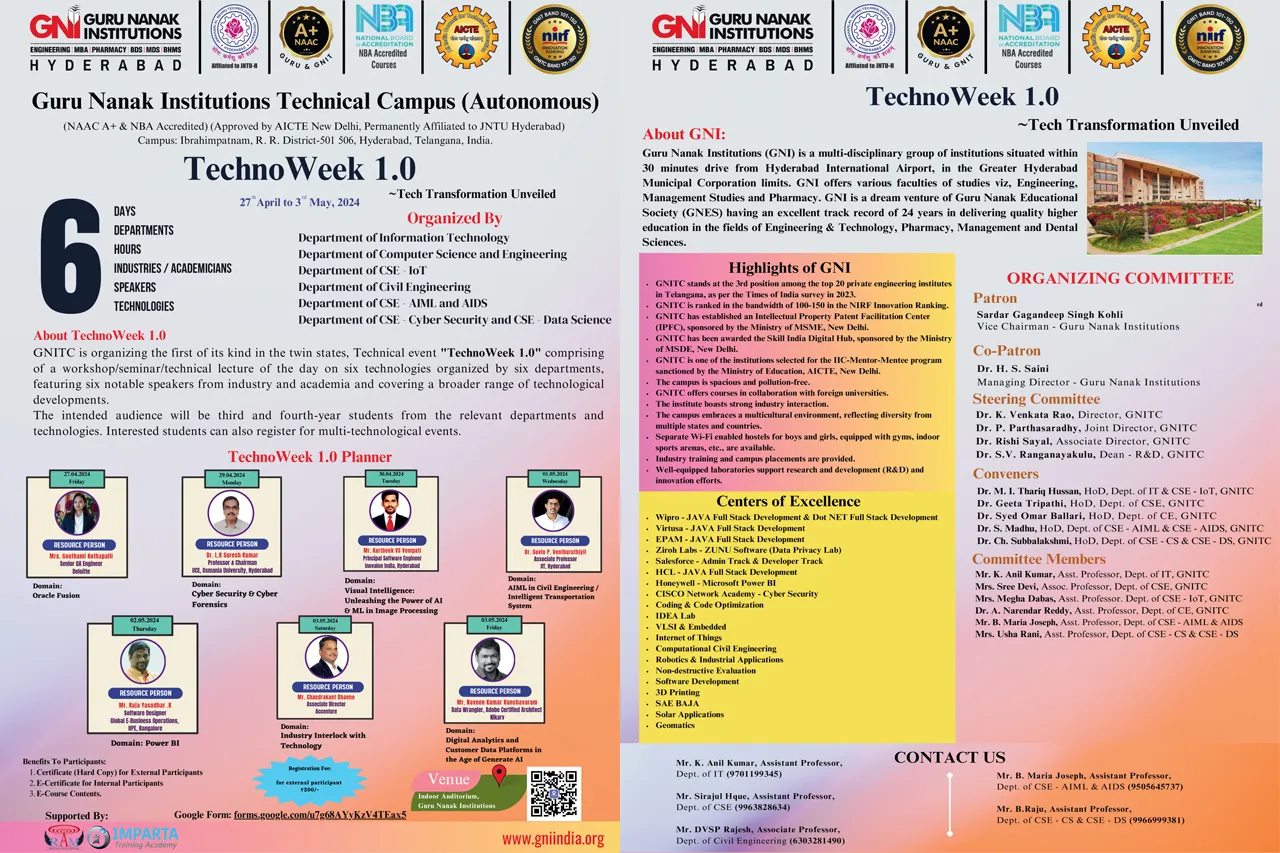
Techno Week 1.0
A TECHNICAL TALK ON
ORACLE FUSION
Date: 27th April, 2024. | 10.00 AM - 4:00 PM
Venue: Indoor Auditorium, GNITC.
Techno Week 1.0
Tech Transformation Unveiled
Date: 27th April - 3rd May, 2024
Venue: Indoor Auditorium, GNITC.
Techno Week 1.0
A TECHNICAL TALK ON
CYBER SECURITY AND
CYBER FORENSICS
Date: 29th April, 2024. | 10.00 AM - 4:00 PM
Venue: Indoor Auditorium, GNITC.
Techno Week 1.0
A TECHNICAL TALK ON VISUAL INTELLIGENCE: UNLEASHING
THE POWER OF AI & ML IN
IMAGE PROCESSING
Date: 30th April, 2024. | 10.00 AM - 4:00 PM
Venue: Indoor Auditorium, GNITC.
Techno Week 1.0
A TECHNICAL TALK ON GEOMETRIC DESIGN/ TRAFFIC SAFETY
Date: 1st May, 2024. | 10.00 AM - 4:00 PM
Venue: Indoor Auditorium, GNITC.
Techno Week 1.0
A TECHNICAL TALK ON POWER BI
Date: 2nd May, 2024. | 10.00 AM - 4:00 PM
Venue: Indoor Auditorium, GNITC.
Techno Week 1.0
A TECHNICAL TALK ON
DIGITAL ANALYTICS AND
CUSTOMER DATA PLATFORMS
IN THE AGE OF GENERATE AI
Date: 3rd May, 2024 | 1.30 AM - 4:00 PM
Venue: Indoor Auditorium, GNITC.
Techno Week 1.0
A TECHNICAL TALK ON
INDUSTRY INTERLOCK
WITH TECHNOLOGY
Date: 3rd May, 2024 | 1.00 AM - 12:30 PM
Venue: Indoor Auditorium, GNITC.


Guru Nanak Institutions is one of the largest educational groups in India with 10,000+ Students currently enrolled in various programs of studies including Engineering and Technology, Pharmacy, Business Management and Dental Science.
Plot No.B2, 2nd Floor, Above Bata Showroom, Vikrampuri Colony, Kharkhana Road, Sec-500 009, Telangana INDIA
Campus AddressIbrahimpatnam, R. R. Dist, Hyderabad - 501506, TELANGANA, INDIA
For student certificate verification, Please contact
GNITC (Guru Nanak Institutions Technical Campus) Mail Id: exams.gnitc@gniindia.org
GNIT (Guru Nanak Institute of Technology) Mail Id: exams.gnit@gniindia.org
For international admission inquiries, please contact us at adadmissions@gniindia.org.
Copyright © 2022 Guru Nanak Institutions. All Rights Reserved. Designed By: Pencap Media.